Ja kõige kulukam nukimeetod. Nukkmehhanismide projekteerimine. Nukkmehhanismi tõukuri liikumisseaduse valik
Tõukurile nuki küljelt mõjuv ja selle liikumist põhjustav jõud suunatakse piki normaaljoont tõukuriga kokkupuutepunktis olevale nukile. Seetõttu on see üldiselt suunatud tõukuri liikumissuuna suhtes nurga all (joonis 46).
Joonis 46
Nurka tõukurile mõjuva jõu ja selle liikumissuuna vahel nimetatakse rõhu nurk(tähistatakse α) ning nurka mõjuva jõu ja tõukuri liikumissuunaga risti oleva suuna vahel nimetatakse ülekandenurk(tähistatud γ-ga). Kokkuvõttes moodustavad need nurgad nurga, mis on võrdne 90 0 , seega, kui arvestada mehhanismi töövõimet, võttes arvesse jõuülekande suunda, saate töötada ükskõik millisega.
Liikumise ülekandenurga vähenemisega väheneb mõjuva jõu liikumapanev komponent (komponent, mis langeb kokku tõukuri liikumissuunaga). Samal ajal suureneb komponent, mis surub tõukurit vastu juhikuid, suurendades tõukuri ja toe vahelist hõõrdejõudu, mis takistab tõukuri liikumist.
V T = S’∙ω lahe
Minimaalse raadiuse ümbermõõdu suurenemine toob aga kaasa kogu konstruktsiooni mõõtmete, kaalu ja materjalikulu suurenemise. Seetõttu on dünaamilise sünteesi ülesandeks määrata selline r min väärtus, mille juures liikumise ülekandenurk ei oleks mehhanismi kõikides asendites lubatust väiksem ning mõõtmed oleksid minimaalsed.
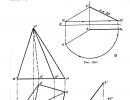
Dünaamilise sünteesi ülesande lahendamine toimub graafiliselt. Kasutatakse järgmist tehnikat (vt joonis 46b): kui lõiku OW nihutatakse paralleelselt iseendaga, joondatakse punkt W punktiga A ja tõmmatakse nurga all sirge
γ selleni läbi teise punkti O, siis läbib see nuki pöörlemiskeskme (st moodustub O-O joon, mis on paralleelne tavalise N-N-ga ja läbib nuki pöörlemiskeskust).
R min määramiseks koostatakse diagramm, mis kannab piki y-telge tõukuri nihke väärtused ( Si) mehhanismi "p" positsioonide jaoks vastavalt antud liikumisseadusele. Igast märgitud punktist, mis on paralleelne abstsissteljega, kantakse sellele positsioonile vastava kiiruste analoogi väärtus ( Si'). Nihked ja kiiruste analoogid tuleks esitada samal skaalal (joonis 47).

Joonis 47
Kiirusanaloogide segmentide otsad on ühendatud sujuva kõveraga ja selle puutujad tõmmatakse nurga all paremale ja vasakule γmin x-teljele ( γmin- minimaalne lubatud liikumise ülekandenurk ummistumise puudumisest). Need kaks sirgjoont eraldavad nuki pöörlemiskeskme valimise lubatud tsooni (nende joonte all) keelatud tsoonist.
Nuki pöörlemiskeskme valik lubatud tsooni mis tahes punktis tagab, et mehhanismi kõigis asendites ei esine ummistusi. Minimaalsete mõõtmete tagamiseks on vaja valida nuki pöörlemiskese lubatud tsooni piiridel (või väikese kõrvalekaldega piiridest, jättes ülekandenurga jaoks teatud varu). See meetod võimaldab ka kõige ratsionaalsemat ekstsentrilisuse valikut.
Nookuriga mehhanismi projekteerimisel on dünaamilise sünteesi probleemi lahendamise lähenemisviisid sarnased. Kuid sel juhul mõõdetakse liikumise ülekandenurka nookuri vastavast asendist. Seetõttu tõmmatakse lubatud tsooni määramisel nuki pöörlemiskeskme valimiseks kiired nurga all.
γ min igas nookuri asendis. Selle tulemusena määratakse lubatud tsoon mitme tala ristumiskohaga (joonis 48).

Joonis 48
Nookuritõukuriga mehhanismi projekteerimisel seatakse paika nookuri pöörlemise seadus. Seetõttu on nurkliikumise parameetrid teada (hoova pöördenurk, nurkkiiruse analoog, nurkkiirenduse analoog). Kiiruste analoogi määramiseks, mis ladestatakse nookuri otsast igasse selle asendisse, on vaja nurkkiiruse analoogi korrutada nookuri pikkusega:

Lameda tõukuriga mehhanismides määrab liikumise ülekande nurga tõukuri plaadi ja tõukuri enda (selle translatsioonilise liikumise telg) vaheline nurk. Seetõttu on liikumise ülekande seisukohalt selle nurga kõige soodsam väärtus 90 0 .
Tõukuri valmistamise ja mehhanismi kokkupanemise tehnoloogia seisukohalt on kõige soodsam ka tõukuri ja selle plaadi vaheline nurk, mis on võrdne 90 0. Seetõttu kasutatakse seda juhtumit tavaliselt praktikas. Sel juhul on liikumapanevaks jõuks kogu nuki küljelt tõukurile mõjuv jõud mehhanismi kõigis asendites (puudub ükski komponent, mis suruks tõukurit juhikutele).
Seega ei ole ummistumise nähtus seda tüüpi mehhanismide puhul asjakohane. Nukk peab aga olema kõigis punktides kumera profiiliga (sest lame nool ei saa töötada nõgusate aladega). Selgub, et mida suurem on minimaalse raadiusega ringi väärtus, seda väiksem on profiilil nõgusate lõikude tekkimise tõenäosus. Seetõttu lahendatakse antud juhul dünaamilise sünteesi probleemiga sarnane ülesanne - vali r min nii, et profiilil ei oleks nõgusaid lõike ja mõõtmed oleksid minimaalsed (ehk tingimusest valitakse r min nuki kumerusest).
Töö eesmärgid on:
- nukkmehhanismi kinemaatilise analüüsi tegemine, mis seisneb tõukuri asendi, kiiruse ja kiirenduse määramises sõltuvalt nuki asendist;
– selle mehhanismi kinemaatilise sünteesi teostamine, mis seisneb viimase teadaoleva minimaalse raadiuse ja tõukuri liikumise diagrammi alusel nukkprofiili konstrueerimises.
5.1. Põhiteave teooriast
Nukk on nukkmehhanismi lüli, millel on muutuv profiili kumerus ja mis teavitab tõukurit vajalikust liikumisseadusest. Nuki profiili- ja faasinurkade mõisted, samuti liikumise ja rõhu ülekandenurgad on toodud varem laboritöö "Nukimehhanismide süntees" punktis 4.1.
Kinemaatilises uuringus (analüüsis) võetakse arvesse konkreetset nukkmehhanismi. Uuringu eesmärk on määrata tõukuri kinemaatilisi omadusi nuki erinevates asendites.
Lihtsaim ja illustreeriv kinemaatilise uurimise viis progresseeruva tõukuriga nukkmehhanismi ja õõtsuva tõukuriga sama mehhanismi puhul on meetod, mis põhineb esimesel näidatud juhul eksperimentaalse diagrammi "nihke- aeg" () juhitava lingi jaoks, millele järgneb selle graafiline integreerimine, et saada diagrammid "kiirus - aeg" () ja "kiirendus - aeg" (), ning teisel juhul - eksperimentaalne diagramm "pöördenurk - aeg" ( ψ = ψ( t)) sarnase seose jaoks selle järgneva integreerimisega, et leida diagrammid "nurkkiirus - aeg" (ω = ω( t)) ja "nurkkiirendus – aeg" (ε = ε( t)). Joonisel fig. 5.1. näitena on need diagrammid esitatud järk-järgult liikuva tõukuri kohta.
Laboratoorsetes töödes kasutatakse mudeli kujul realiseeritud nukkmehhanismi, mille põhielementideks on alus ja sellele paigaldatud tõukur ja nukk, millele ketas fikseeritakse. Et tagada eksperimentaalse diagrammi koostamise võimalus (või ψ = ψ( t)) kettal on skaala gradueeritud 0 O kuni 360 O ja tõukuril või aluse külge kinnitatud plaadil on skaala jaotustega millimeetrites või kraadides.
Tavaliselt nukkmehhanismis liigub nukk ühtlaselt. Sel juhul aeg t nuki liikumine on võrdeline selle pöördenurgaga φ. Seetõttu diagrammid ja ψ = ψ( t) on mõlemad diagrammid (φ) ja ψ = ψ(φ).
Diagrammidel olev ajaskaala määratakse järgmise põhjal.
1) Nuki töönurk vastab lõike pikkusele l skeemil (joonis 5.1). Järelikult
kus L on diagrammi segmendi pikkus, mis vastab nuki ühele pöördele.
2) Ühe pöörde aeg
kus P- nuki pöörete arv minutis.
Siis ajaskaala on
Progressiivselt liikuva tõukuriga nukkmehhanismi korral arvutatakse nihkediagrammi skaala, kiirus ja kiirendus teadaolevate valemite abil:
kus H 1 ja H 2 – pooluste kaugused, mm; s– tegelik nihe, m; s diagr – suurus diagrammil, mm.
Kiiktõukuriga nukkmehhanismi puhul on pöördenurga diagrammide skaalad ψ = ψ( t), nurkkiirus ja nurkiirendus ε = ε( t) tõukuri määravad valemitega:
Valemis (5.7) ψ on tõeline pöördenurk, rad., ψ diagr on suurus diagrammil, mm.
Ülaltoodu kohaselt koostatud kinemaatilised diagrammid on nukkmehhanismi kinemaatilise sünteesi läbiviimise aluseks. Selle sünteesi rakendamise tunnused on toodud distsipliini loengukursuses.
5.2. Töökäsk
1. Pöörates nuki aeglaselt, fikseerige hetk, mil tõukur hakkab tõusma ja hetk, mil see lõpeb. Nukiga jäigalt ühendatud skaalal määrake pöördenurk φ y. Samamoodi määrake nurk φ c. Iga nurk φ y ja φ on jagatud mitmeks ( n) võrdsetes osades (näiteks kuus).
2. Nuki pööramine läbi nurkade φ i, mõõta tõukuri nihet s i millimeetrites või ψ i kraadides veolüli skaalast või nukkmehhanismi mudeli alusel, esmalt eemaldamise ja seejärel tagasivoolu sektsioonis. Koguge saadud andmed tabelisse.
3. Joonista tabeli järgi graafik (või ), mis on ühtlasi ka graaf (või ).
4. Kasutades graafilise diferentseerimise meetodit, koostage graafikud ja (või ja )
5. Määrake valemite (5.3) ... (5.9) abil aja, tee, kiiruse ja kiirenduse skaala.
6. Tehke mehhanismi süntees. Koostage nukkmehhanismi kinemaatiline diagramm selle uurimise käigus saadud mõõtmete järgi. Nõutav kaamera minimaalse raadiuse ehitamiseks r 0 , ekstsentrilisus e, telgede vaheline kaugus O ja AT vastavalt nuki ja tõukuri pöörlemine, samuti pikkus AB tõukuri nookurid on mõõdetud mehhanismi mudelil.
7. Kuvage kõik nuki faasi- ja profiilinurgad.
8. Näidake ühes nuki vahepealses asendis tõukurit vastupidises liikumises ning määrake selle asendi jaoks liikumise ülekandenurk γ ja nukkmehhanismi survenurk α.
9. Koosta aruanne.
5.3. Küsimused enesekontrolliks
1. Milliseid nukknurki nimetatakse profiiliks ja milliseid faasideks? Mis on nende erinevus?
2. Kuidas toimub graafiline eristamine?
3. Kuidas arvutada diagrammi skaalasid?
4. Mis on liikumise ümberpööramise meetodi olemus?
5. Kuidas ehitada nukkprofiil progresseeruvalt liikuvate ja võnkuvate tõukuritega nukkmehhanismides?
6. Mida nimetatakse survenurgaks ja liikumise ülekandenurgaks?
7. Kuidas mõjutab survenurk nukkmehhanismi tööd?
8. Näidake surve- ja ülekandenurki nukkprofiili mis tahes punktis.
3.3. Nukkmehhanismide faasid. Faasi- ja projekteerimisnurgad
Nukkmehhanismid võivad väljundlingis rakendada peaaegu igasuguse keerukusega liikumisseadusi. Kuid mis tahes liikumisseadust saab esindada järgmiste faaside kombinatsiooniga:
1. Eemaldamise faas. Väljundlüli (järgija või klahv) liigutamise protsess, kui nuki ja järgija kontaktpunkt liigub nuki pöörlemiskeskmest eemale.
2. Tagastamise faas (lähendamine). Väljundlüli liigutamine nuki ja järgija vahelise kokkupuutepunktina läheneb nuki pöörlemiskeskmele.
3. Kokkupuute faasid. Olukord, kui pöörleva nuki korral on nuki ja tõukuri kokkupuutepunkt paigal. Samal ajal eristavad nad peaaegu viibimise faas– kui kontaktpunkt on nuki keskkohale kõige lähemal, pikamaa faas– kui puutepunkt on nuki keskpunktist kõige kaugemal ja vahefaasid. Viivitusfaasid toimuvad siis, kui puutepunkt liigub piki kaamera profiili lõiku, mis on kaamera pöörlemiskeskmest tõmmatud ringikaare kujuline.
Ülaltoodud faaside klassifikatsioon viitab peamiselt positsioonimehhanismidele.
Iga tööetapp vastab oma mehhanismi faasinurgale ja nuki projekteerimisnurgale.
Faasinurk on nurk, mille kaudu nukk peab vastava tööfaasi lõpuleviimiseks pöörduma. Neid nurki tähistatakse tähega koos indeksiga, mis näitab faasi tüüpi, näiteks Y on eemaldamise faasinurk, D on kaugviivituse faasinurk, B on tagasivoolu faasinurk, B on lähiaja faasinurk.
Nuki projekteerimisnurgad määravad selle profiili. Neid tähistatakse samade indeksitega tähega . Joonisel fig. 3.2a näitab neid nurki. Need on piiratud kiirtega, mis on tõmmatud nuki pöörlemiskeskmest selle keskprofiili punktidesse, kus nukiprofiil ühest faasist teise üleminekul muutub.
Esmapilgul võib tunduda, et faasi- ja projekteerimisnurgad on võrdsed. Näitame, et see ei ole alati nii. Selleks teostame joonisel fig. 3.2b. Siin seatakse tõukuriga mehhanism, kui sellel on ekstsentrilisus, asendisse, mis vastab eemaldamisfaasi algusele; juurde- nuki ja tõukuri kokkupuutepunkt. Punkt juurde' on punkti asukoht juurde, mis vastab eemaldamisfaasi lõpule. Konstruktsioonist on näha, et selleks, et punkt juurde võttis seisukoha juurde nukk peab pöörlema läbi nurga Y, mis ei ole võrdne Y, kuid erineb nurga e võrra, mida nimetatakse ekstsentrilisuse nurgaks. Tõukuriga mehhanismide jaoks saab kirjutada järgmised seosed:
Y \u003d Y + e, B \u003d B - e,
D = D, B = B
3.4. Väljundlüli liikumisseaduse valik
Väljundlüli liikumisseaduse valimise meetod sõltub mehhanismi eesmärgist. Nagu juba märgitud, jagunevad nukkmehhanismid vastavalt nende otstarbele kahte kategooriasse: positsioonilised ja funktsionaalsed.

3.4.1. Positsioonilised mehhanismid
Selguse huvides vaatleme kahepositsioonilise mehhanismi kõige lihtsamat juhtumit, mis lihtsalt "viib" väljundlingi ühest äärmisest asendist teise ja tagasi.
Joonisel fig. 3.3 näitab liikumisseadust - sellise mehhanismi tõukuri liikumise graafikut, kui kogu tööprotsessi esindab nelja vaasi kombinatsioon: eemaldamine, kauge puhkus, tagasipöördumine ja lähipuhkus. Siin on nuki pöördenurk ja vastavad faasinurgad on tähistatud: y, d, c, b. Väljundlüli nihe on joonistatud piki ordinaattelge: nookuriga mehhanismide puhul on see - selle pöördenurk, tõukuriga mehhanismide puhul S - tõukuri nihe. 
Sel juhul seisneb liikumisseaduse valik väljundlüli liikumise olemuse määramises eemaldamise ja tagasipöördumise faasis. Joonisel fig. 3.3 nende lõikude jaoks on näidatud mingisugune kõver, kuid just see kõver tuleb määrata. Millised kriteeriumid on selle probleemi lahendamise aluseks?
Lähme vastupidiselt. Proovime teha "lihtsalt". Seadkem lineaarne nihkeseadus eemaldamise ja tagasipöördumise piirkondades. Joonisel fig. 3.4 näitab, milleni see kaasa toob. Diferentseerides funktsiooni () või S() kaks korda, saame, et teoreetiliselt lõpmatu, s.t. ettearvamatud kiirendused ja sellest tulenevalt ka inertsiaalsed koormused. Seda vastuvõetamatut nähtust nimetatakse kõvafaasi šokiks.
Selle vältimiseks tehakse liikumisseaduse valik väljundlingi kiirendusgraafiku alusel. Joonisel fig. 3.5 on näide. Arvestades kiirendusgraafiku soovitud kuju ja selle integreerimist, leitakse kiiruse ja nihke funktsioonid. 
Väljundlüli kiirenduse sõltuvus eemaldamise ja tagastamise faasis valitakse tavaliselt šokivabaks, s.o. pideva funktsioonina ilma kiirendushüpeteta. Kuid mõnikord on väikese kiirusega mehhanismide puhul mõõtmete vähendamiseks nähtus lubatud pehme löök, kui kiirendusgraafikul täheldatakse hüppeid, kuid piiratud, prognoositava summa võrra.
Joonisel fig. 3.6 esitab näiteid kõige sagedamini kasutatavatest kiirenduse muutumise seaduste tüüpidest. Funktsioonid on näidatud kustutamise faasi jaoks, need on tagastamisfaasis sarnased, kuid peegeldatud. Joonisel fig. 3.6 esitab sümmeetrilised seadused, kui 1 = 2 ja nende lõikude kõverate olemus on sama. Vajadusel rakendatakse ka asümmeetrilisi seadusi, kui 1 2 või nende lõikude kõverate olemus on erinev või mõlemad.
Konkreetse tüübi valik sõltub mehhanismi töötingimustest, näiteks seadust 3.6d kasutatakse siis, kui eemaldamise (tagasi)faasis on vaja väljundlingi konstantse kiirusega sektsiooni.
Reeglina on kiirendusseaduste funktsioonidel analüütilised avaldised, eriti 3.6, a, e - sinusoidi segmendid, 3.6, b, c, g - sirgjoonte segmendid, 3.6, e - koosinuslaine, nii et nende integreerimine kiiruse ja liikumise saavutamiseks pole keeruline. Kiirenduse amplituudi väärtused pole aga ette teada, küll aga on teada väljundlingi nihke väärtus eemaldamise ja tagasivoolu faasis. Mõelgem, kuidas leida nii kiirenduse amplituudi kui ka kõiki funktsioone, mis iseloomustavad väljundlingi liikumist.
Nuki konstantse pöörlemise nurkkiiruse korral, kui selle pöördenurk ja aeg on seotud avaldisega = t funktsioone saab arvestada nii aja kui ka pöördenurga järgi. Vaatleme neid õigeaegselt ja nookuriga mehhanismi suhtes.
Algstaadiumis määrame kiirendusgraafiku kuju normaliseeritud, st ühikulise amplituudiga funktsiooni *( t). Joonisel fig. 3.6a see on *( t) = sin(2 t/T), kus Т on aeg, mille jooksul mehhanism läbib eemaldamise või tagastamise faasi. Väljundlingi tegelik kiirendus:
2 (t) = m *(t), (3,1) 
kus m on hetkel teadmata amplituud.
Integreerides avaldise (3.1) kaks korda, saame:
![]()
![]()
Integreerimine toimub algtingimustega: eemaldamise faasi jaoks 2 ( t) = 0, 2 ( t) = 0; tagasivoolu faasi jaoks 2 ( t) = 0, 2 ( t) = m . Väljundlüli nõutav maksimaalne nihe m on teada, seega kiirenduse amplituud
Iga funktsiooni väärtus 2 ( t), 2 ( t), 2 (t) saab omistada väärtustele 2 (), 2 (), 2 (), mida kasutatakse mehhanismi projekteerimiseks, nagu allpool kirjeldatud.
Tuleb märkida, et nukkmehhanismide löökide ilmnemisel on veel üks põhjus, mis on seotud nende töö dünaamikaga. Nukk võib olla konstrueeritud ka põrutusteta selles mõttes, nagu me selle kontseptsiooni eespool kirjeldasime. Kuid suurel kiirusel saab toiteahelaga mehhanismide puhul tõukuri (kiikvarre) nukist eraldada. Mõne aja pärast taastab sulgemisjõud kontakti, kuid see taastumine toimub löögiga. Sellised nähtused võivad ilmneda näiteks siis, kui tagasivoolufaas on liiga väikeseks seatud. Seejärel osutub nukkprofiil selles faasis järsuks ja kaugviivituse faasi lõpus ei jõua sulgemisjõul aega kontakti luua ja tõukur murrab nukiprofiili kaugemal. lõppu ja võib isegi lähiotsas kohe tabada mõnda nuki punkti. Positiivsete lukustusmehhanismide korral liigub rull mööda nuki soont. Kuna rulli ja soone seinte vahel on tingimata tühimik, lööb rull töötamise ajal vastu seinu, suureneb ka nende löökide intensiivsus koos nuki pöörlemiskiirusega. Nende nähtuste uurimiseks on vaja koostada kogu mehhanismi matemaatiline mudel, kuid need küsimused jäävad sellest kursusest välja.
| " |
Kaamera disain
Kokkuvõte: Nukimehhanismid. Eesmärk ja ulatus. Nukkmehhanismi tõukuri liikumisseaduse valik. Nukkmehhanismide klassifikatsioon. Peamised parameetrid. Kiiruse analoogi geomeetriline tõlgendus. Survenurga mõju nukkmehhanismi tööle. Nukkmehhanismi süntees. Sünteesi etapid. Rulli raadiuse valik (tõukuri tööosa ümardamine).
Nukimehhanismid
Paljude masinate tööprotsess nõuab mehhanismide olemasolu, mille väljundlülide liikumine peab toimuma rangelt etteantud seaduse järgi ja kooskõlastatud teiste mehhanismide liikumisega. Sellise ülesande täitmiseks on kõige lihtsamad, usaldusväärsemad ja kompaktsemad nukkmehhanismid.
Kulatškov kutsutakse kõrgema kinemaatilise paariga kolmelüliline mehhanism, mille sisendlüli kutsutakse nukk ja väljund tõukur(või rokkar).
nukk nimetatakse lüliks, kuhu kuulub kõrgema kinemaatilise paari element, mis on tehtud muutuva kumerusega pinna kujul.
Nimetatakse sirgjooneliselt liikuvat väljundlinki tõukur, ja pöörlemine (kiikumine) - rokkar.
Tihti on libiseva hõõrdumise asendamiseks veerehõõrdumisega kõrgeimas paaris ja nii nuki kui ka tõukuri kulumise vähendamiseks mehhanismi skeemile lisatud täiendav lüli - rull ja pöörlev kinemaatiline paar. Liikuvus selles kinemaatilises paaris ei muuda mehhanismi ülekandefunktsioone ja on lokaalne liikuvus.
Nad reprodutseerivad teoreetiliselt täpselt väljundlingi – tõukuri liikumist. Tõukuri liikumise seadus, mille annab ülekandefunktsioon, määrab nuki profiil ja see on nukkmehhanismi peamine omadus, millest sõltuvad selle funktsionaalsed omadused, aga ka dünaamilised ja vibratsioonilised omadused. Nukkmehhanismi projekteerimine on jagatud mitmeks etapiks: tõukuri liikumisseaduse määramine, plokkskeemi valimine, põhi- ja üldmõõtmete määramine, nukiprofiili koordinaatide arvutamine. .
Eesmärk ja ulatus
Nukkmehhanismid on loodud selleks, et muuta nuki pöörlev või translatsiooniline liikumine tõukuri edasi-tagasi pöörlevaks või edasi-tagasi liikumiseks. Nukkmehhanismide oluliseks eeliseks on võimalus tagada väljundlingi täpsed paigad. See eelis määras nende laialdase kasutuse kõige lihtsamates tsüklilistes automaatsetes seadmetes ja mehaanilistes arvutusseadmetes (aritmomeetrid, kalendermehhanismid). Nukkmehhanismid võib jagada kahte rühma. Esimese mehhanismid tagavad tõukuri liikumise etteantud liikumisseaduse järgi. Teise rühma mehhanismid tagavad ainult väljundlüli määratud maksimaalse nihke - tõukuri käigu. Sel juhul valitakse seadus, mille järgi see liikumine toimub, tüüpiliste liikumisseaduste hulgast, sõltuvalt töötingimustest ja tootmistehnoloogiast.
Nukkmehhanismi tõukuri liikumisseaduse valik
Tõukuri liikumise seadus nimetatakse tõukuri nihkefunktsiooniks (lineaarne või nurk), samuti üks selle tuletistest, mis on võetud ajas või üldistatud koordinaadina - juhtiva lüli nihkeks - nukk. Nukkmehhanismi projekteerimisel dünaamilisest vaatenurgast on soovitav lähtuda tõukuri kiirenduse muutumise seadusest, kuna just kiirendused määravad mehhanismi töö käigus tekkivad inertsjõud.
Liikumisseadusi on kolm rühma, mida iseloomustavad järgmised omadused:
1. tõukuri liikumisega kaasnevad tugevad löögid,
2. tõukuri liikumisega kaasnevad pehmed löögid,
3. Tõukuri liikumine toimub ilma šokita.
Väga sageli on vastavalt tootmistingimustele vaja tõukurit liigutada ühtlase kiirusega. Rakendades sellist tõukuri liikumisseadust kiiruse järsu muutumise asemel, ulatub kiirendus teoreetiliselt lõpmatuseni, samuti peavad dünaamilised koormused olema lõpmatult suured. Praktikas ei saavutata lülide elastsuse tõttu lõpmata suurt dünaamilist koormust, kuid selle suurus on siiski väga suur. Selliseid lööke nimetatakse "kõvaks" ja need on lubatud ainult väikese kiirusega mehhanismides ja väikese tõukuri raskusega.
Pehme löökidega kaasneb nukkmehhanismi töötamine, kui kiirusfunktsioonil ei ole katkestusi, kuid tõukuri kiirendusfunktsioon (või kiirenduse analoog) läbib katkestuse. Kiirenduse hetkeline muutus piiratud hulga võrra põhjustab dünaamiliste jõudude järsu muutuse, mis väljendub ka löögi kujul. Need rünnakud on aga vähem ohtlikud.
Nukkmehhanism töötab sujuvalt, põrutusteta, kui tõukuri kiiruse ja kiirenduse funktsioonid ei katke, muutuvad sujuvalt ja eeldusel, et liikumise alguses ja lõpus on kiirused ja kiirendused võrdsed nulliga.
Tõukuri liikumisseadust saab esitada nii analüütilisel kujul - võrrandi kujul kui ka graafilisel kujul - diagrammi kujul. Kursuseprojekti ülesannetes leitakse diagrammidena esitatud järgmised tõukurrulli keskpunkti kiirenduste analoogide muutumise seadused:
Tõukuri kiirenduse analoogi ühtlaselt kiirendatud muutumise seadus koos tõukuri liikumise ühtlaselt kiirendatud seadusega kogeb kavandatud nukkmehhanism pehmeid lööke iga intervalli alguses ja lõpus.
Kiirenduse analoogi kolmnurkne muutumise seadus tagab nukkmehhanismi põrutusteta töö.
Mehhanismi põrutusvaba töö tagab ka kiirenduse analoogi trapetsikujuline muutumise seadus.
Kiirenduse analoogi muutumise sinusoidne seadus. Tagab liikumise suurima sujuvuse (iseloomulik on see, et sujuvalt ei muutu mitte ainult kiirus ja kiirendus, vaid ka kõrgemat järku tuletised). Selle liikumisseaduse puhul on aga maksimaalne kiirendus samade faasinurkade ja tõukuri käigu juures suurem kui ühtlaselt kiirendatud ja trapetsikujuliste kiirenduste analoogide muutumise seaduste korral. Selle liikumisseaduse puuduseks on see, et kiiruse kasv tõusu alguses ja sellest tulenevalt ka tõus ise on aeglane.
Kiirenduse analoogi koosinusoidne muutumise seadus põhjustab pehmeid lööke tõukekäigu alguses ja lõpus. Koosinusseadusega on aga löögi alguses kiire kiiruse tõus ja lõpus kiire langus, mis on paljude nukkmehhanismide töötamise korral soovitav.
Dünaamiliste koormuste seisukohalt on soovitavad löögivabad seadused. Selliste liikumisseadustega nukid on aga tehnoloogiliselt keerukamad, kuna nõuavad täpsemaid ja keerukamaid seadmeid, mistõttu on nende valmistamine palju kallim. Tugevate löökidega seadustel on väga piiratud rakendusala ja neid kasutatakse mittekriitilistes mehhanismides madalatel kiirustel ja madalal vastupidavusel. Põrutusvabade seadustega nukke on soovitatav kasutada suure liikumiskiirusega mehhanismides, mille täpsus- ja vastupidavusnõuded on ranged. Kõige levinumad on pehmete löökidega liikumisseadused, mille abil on võimalik luua ratsionaalne kombinatsioon tootmiskuludest ja mehhanismi tööomadustest.
LOENG 17.-18
L-17Kokkuvõte: Nukkmehhanismide eesmärk ja ulatus, peamised eelised ja puudused. Nukkmehhanismide klassifikatsioon. Nukkmehhanismide põhiparameetrid. Nukkmehhanismi struktuur. Nukkmehhanismi tsüklogramm.
L-18 Kokkuvõte: Tõukuri tüüpilised liikumisseadused. Mehhanismi töövõime kriteeriumid ja rõhunurk liikumise ülekande ajal kõrgemas kinemaatilises paaris. Meetrilise sünteesi probleemi püstitus. Sünteesi etapid. Progressiivselt liikuva tõukuriga nukkmehhanismi meetriline süntees.
Testi küsimused.
Kaamera mehhanismid:
Kulatškov kõrgema kinemaatilise paariga kolmelülilist mehhanismi nimetatakse sisendlüliks, mida nimetatakse nukiks, ja väljundlüli tõukuriks (või nookuriks). Tihti on libiseva hõõrdumise asendamiseks veerehõõrdumisega kõrgeimas paaris ja nii nuki kui ka tõukuri kulumise vähendamiseks mehhanismi skeemile lisatud täiendav lüli - rull ja pöörlev kinemaatiline paar. Liikuvus selles kinemaatilises paaris ei muuda mehhanismi ülekandefunktsioone ja on lokaalne liikuvus.
Eesmärk ja ulatus:
Nukkmehhanismid on loodud selleks, et muuta nuki pöörlev või translatsiooniline liikumine tõukuri edasi-tagasi pöörlevaks või edasi-tagasi liikumiseks. Samas on kahe liikuva lüliga mehhanismis võimalik teostada liikumise teisendust keerulise seaduse järgi. Oluline eelis nukkmehhanismid on võime pakkuda väljundlingi täpset peatumist. See eelis määras nende laialdase kasutuse kõige lihtsamates tsüklilistes automaatsetes seadmetes (nukkvõll) ja mehaanilistes arvutusseadmetes (aritmomeetrid, kalendermehhanismid). Nukkmehhanismid võib jagada kahte rühma. Esimese mehhanismid tagavad tõukuri liikumise etteantud liikumisseaduse järgi. Teise rühma mehhanismid tagavad ainult väljundlüli määratud maksimaalse nihke - tõukuri käigu. Sel juhul valitakse seadus, mille järgi see liikumine toimub, tüüpiliste liikumisseaduste hulgast, sõltuvalt töötingimustest ja tootmistehnoloogiast.
Nukkmehhanismide klassifikatsioon:
Nukkmehhanismid klassifitseeritakse järgmiste kriteeriumide alusel:
- vastavalt lülide paigutusele ruumis
- ruumiline
- tasane
- vastavalt nuki liikumisele
- pöörlev
- progressiivne
- vastavalt väljundlingi liikumisele
- edasi-tagasi liikuv (tõukuriga)
- edasi-tagasi pöörlev (klappvarrega)
- video saadavuse järgi
- rulliga
- ilma rullita
- nuki tüübi järgi
- ketas (lame)
- silindriline
- väljundlingi tööpinna kuju järgi
- tasane
- osutas
- silindriline
- sfääriline
- kõrgema paari elementide sulgemismeetodi järgi
- võimsus
- geomeetriline
Jõuga sulgemise korral toimub tõukuri eemaldamine nuki kontaktpinna mõjul tõukurile (vedav lüli on nukk, vedav lüli on tõukur). Tõukuri liikumine lähenemisel toimub vedru elastsusjõu või tõukuri raskusjõu mõjul, samas kui nukk ei ole juhtiv lüli. Positiivse lukustuse korral toimub tõukuri liikumine eemaldamise ajal nuki välise tööpinna mõjul tõukurile, lähenedes - nuki sisemise tööpinna mõjul tõukurile. Mõlemas liikumise faasis on nukk vedavaks lüliks ja tõukuriks käitavaks lüliks.
Nukkmehhanismi tsüklogramm
Riis. 2
Enamik nukkmehhanisme on tsüklilised mehhanismid tsükliperioodiga 2p. Tõukuri liikumistsüklis saab üldjuhul eristada nelja faasi (joonis 2): eemaldamine lähimast (nuki pöörlemiskeskme suhtes) kõige kaugemasse asendisse, kaugel seismine (või kõige kaugemas asendis seismine), kaugeimast asendist naasmine lähimas ja lähimas seistes (lähimas asendis seismine). Vastavalt sellele jagunevad nukinurgad või faasinurgad järgmisteks osadeks:
- eemaldamise nurk jy
- kauguse nurk j d
- tagastusnurk j sisse
- seisunurga lähedal j b .
Summa φ y + φ d + φ sisse nimetatakse töönurgaks ja tähistavad φ r. Seetõttu
φ y + φ d + φ sisse = φ r.
Nukkmehhanismi peamised parameetrid
Mehhanismi nukki iseloomustavad kaks profiili: keskne (või teoreetiline) ja konstruktiivne. Under konstruktiivne viitab nuki välisele tööprofiilile. Teoreetiline või keskus nimetatakse profiili, mis nukkkoordinaadisüsteemis kirjeldab rulli keskpunkti (või tõukuri tööprofiili ümardamist), kui rull liigub mööda nuki konstruktiivset profiili. Faasinurka nimetatakse nuki pöördenurgaks. profiili nurk di nimetatakse teoreetilise profiili praeguse tööpunkti nurkkoordinaadiks, mis vastab voolu faasinurgale ji.
Üldiselt ei võrdu faasinurk profiilinurgaga ji¹di.
Joonisel fig. 17.2 on kujutatud lame nukkmehhanismi skeemi, millel on kahte tüüpi väljundlülid: teljest väljas koos translatsioonilise liikumisega ja õõtsuv (edasi-pöörleva liikumisega). Sellel diagrammil on näidatud lamedate nukkmehhanismide peamised parameetrid.
Joonisel 17.2:
Nuki teoreetilist profiili esitatakse tavaliselt polaarkoordinaatides sõltuvusega ri = f(di),
kus ri on nuki teoreetilise või keskprofiili praeguse punkti raadiuse vektor.
Nukkmehhanismide ehitus
Rulliga nukkmehhanismis on erinevatel funktsionaalsetel eesmärkidel kaks liikuvust: W 0 \u003d 1 - mehhanismi peamine liikuvus, mille abil toimub liikumise ümberkujundamine vastavalt antud seadusele, W m = 1 - lokaalne liikuvus, mis viiakse mehhanismi sisse, et asendada kõrgeimas libisemishõõrdepaaris veerehõõrdumise teel.
Nukkmehhanismi kinemaatiline analüüs
Nukkmehhanismi kinemaatilist analüüsi saab läbi viia mis tahes ülalkirjeldatud meetodi abil. Väljundlüli tüüpilise liikumisseadusega nukkmehhanismide uurimisel kasutatakse kõige sagedamini kinemaatiliste diagrammide meetodit. Selle meetodi rakendamiseks tuleb defineerida üks kinemaatiline diagramm. Kuna nukkmehhanism on antud kinemaatilises analüüsis, on selle kinemaatiline skeem ja nuki konstruktiivse profiili kuju teada. Nihkediagrammi konstrueerimine toimub järgmises järjestuses (teljevälise translatsiooniliselt liikuva tõukuriga mehhanismi puhul):
- ehitatakse ringide perekond, mille raadius on võrdne rulli raadiusega, puutudes nuki konstruktsiooniprofiiliga; selle perekonna ringide keskpunktid on ühendatud sujuva kõveraga ja saadakse nuki keskpunkt ehk teoreetiline profiil
- raadiusega ringid kantakse saadud keskprofiili r0 ja r0 +hAmax , määratakse ekstsentrilisuse väärtus e
- nende lõikude suuruse järgi, mis ei lange kokku raadiusega ringide kaaredega r0 ja r0 +hAmax , faasinurgad jwork, jу, jeng ja jс
- ringikujuline kaar r , mis vastab tööfaasi nurgale, on jagatud mitmeks diskreetseks osaks; sirgjooned tõmmatakse läbi ekstsentrilisuse raadiuse ringi puutuvate jaotuspunktide (need jooned vastavad tõukuri telje positsioonidele selle liikumisel nuki suhtes)
- nendel sirgjoontel mõõdetakse keskprofiili ja raadiusringi vahel paiknevaid segmente r0
; need segmendid vastavad tõukurrulli keskkoha nihketele SVi
vastavalt saadud liigutustele SVi konstrueeritakse tõukurrulli keskpunkti asukoha funktsiooni skeem SВi= f(j1)
Joonisel fig. 17.4 on kujutatud skeemi asendifunktsiooni konstrueerimiseks nukkmehhanismile, millel on keskne (e = 0) translatsiooniliselt liikuv rullik.
Tõukuri liikumise tüüpilised seadused .
Nukkmehhanismide projekteerimisel valitakse tõukuri liikumisseadus tüüpiliste hulgast.
Tüüpilised liikumisseadused jagunevad tugeva ja pehme mõjuga seadusteks ning löögita seadusteks. Dünaamiliste koormuste seisukohalt on soovitavad löögivabad seadused. Selliste liikumisseadustega nukid on aga tehnoloogiliselt keerukamad, kuna nõuavad täpsemaid ja keerukamaid seadmeid, mistõttu on nende valmistamine palju kallim. Tugevate löökidega seadustel on väga piiratud rakendusala ja neid kasutatakse mittekriitilistes mehhanismides madalatel kiirustel ja madalal vastupidavusel. Põrutusvabade seadustega nukke on soovitatav kasutada suure liikumiskiirusega mehhanismides, mille täpsus- ja vastupidavusnõuded on ranged. Kõige levinumad on pehmete löökidega liikumisseadused, mille abil on võimalik luua ratsionaalne kombinatsioon tootmiskuludest ja mehhanismi tööomadustest.
Pärast liikumisseaduse tüübi valimist, tavaliselt kinemaatiliste diagrammide meetodil, viiakse läbi mehhanismi geomeetrilis-kinemaatiline uuring ja arvutatakse tõukuri nihke seadus ja esimese ülekandefunktsiooni muutumise seadus tsükli kohta. määratud (vt joonist fig. loeng 3- kinemaatiliste diagrammide meetod).
Tabel 17.1
Eksami jaoks
Jõudluskriteeriumid ja survenurk liikumise edastamisel sisse kõrgem kinemaatiline paar.
rõhu nurk määrab normaalse asendi p-p kõrgeimas käigukastis kiirusvektori ja veolüli kontaktpunkti suhtes (joonis 3, a, b). Selle väärtuse määravad mehhanismi mõõtmed, ülekandefunktsioon ja tõukuri liikumine S .
Liikumise ülekandenurk γ- vektorite vaheline nurk υ 2 ja υ rel puutepunktis asuva tõukuri punkti absoluutsed ja suhtelised (nuki suhtes) kiirused AGA(Joonis 3, a, b):
Kui jätta tähelepanuta hõõrdejõud nuki ja tõukuri vahel, siis jõud, mis paneb tõukuri liikuma (vedav jõud), on rõhk K tõukurile punktis kinnitatud nukk AGA ja suunatud mööda ühist normaalset p-p nuki ja tõukuri profiilidele. Lagundame jõudu K vastastikku risti olevateks komponentideks Q1 ja K 2 , millest esimene on suunatud kiiruse suunas υ 2 . Tugevus Q1 liigutab tõukurit, ületades samal ajal kogu tõukurile rakenduva kasuliku (seotud tehnoloogiliste ülesannete täitmisega) ja kahjuliku (hõõrdejõud) takistuse. Tugevus Q2 suurendab hõõrdejõude tõukuri ja hammaslati moodustatud kinemaatilises paaris.
Ilmselgelt nurga vähenedes γ tugevus Q1 väheneb ja tugevus K 2 suureneb. Mõne nurga väärtuse jaoks γ võib selguda, et jõud Q1 ei suuda ületada kõiki tõukurile rakendatavaid takistusi ja mehhanism ei tööta. Sellist nähtust nimetatakse segamine mehhanism ja nurk γ , mille juures see toimub, nimetatakse kiilumisnurgaks γ jätk.
Nukkmehhanismi projekteerimisel seatakse rõhunurga lubatud väärtus lisaks, tagades tingimuse täitmise γ ≥ γ min > γ kon , st voolunurk γ üheski nukkmehhanismi asendis ei tohi olla väiksem kui minimaalne ülekandenurk γm sisse ja ületab oluliselt ummistusnurka γ con .
Järk-järgult liikuva tõukuriga nukkmehhanismide puhul on see soovitatav γ min = 60°(Joonis 3, a) ja γ min = 45°- pöörleva tõukuriga mehhanismid (joonis 3, b).
Nukkmehhanismi põhimõõtmete määramine.
Nukkmehhanismi mõõtmed määratakse, võttes arvesse ülemise paari lubatud survenurka.
Tingimus, millele nuka pöörlemiskeskme asend peab vastama O 1 : survenurgad tagasitõmbamisfaasis peavad profiili kõikides punktides olema lubatust väiksemad. Seetõttu graafiliselt punkti asukoha ala O 1 saab määrata sirgjoonte perekonnaga, mis on tõmmatud tõukurile kuuluva keskprofiili punkti võimaliku kiiruse vektori suhtes lubatud rõhunurga all. Ülaltoodu graafiline tõlgendus tõukuri ja nookuri jaoks on toodud joonisel fig. 17.5. Eemaldamise etapis koostatakse sõltuvusdiagramm S B = f(j1). Kuna rokkariga punkt AT liigub mööda raadiusega ringkaaret l eKr, siis nookuriga mehhanismi puhul konstrueeritakse diagramm kõverjoonelistes koordinaatides. Kõik diagrammil olevad konstruktsioonid viiakse läbi samal skaalal, see tähendab m l = m Vq = m S .
Nukkmehhanismi sünteesil, nagu iga mehhanismi sünteesil, lahendatakse mitmeid ülesandeid, millest kahte käsitletakse TMM-i kursusel:
plokkskeemi valimine ja mehhanismi lülide (sh nukkprofiili) põhimõõtmete määramine.
Sünteesi etapid
Sünteesi esimene etapp on struktuurne. Plokkskeem määrab mehhanismi linkide arvu; kinemaatikapaaride arv, tüüp ja liikuvus; üleliigsete ühenduste arv ja kohalik mobiilsus. Struktuurses sünteesis on vaja põhjendada iga üleliigse sideme ja kohaliku mobiilsuse mehhanismi sisseviimist skeemi. Plokkskeemi valiku määravad tingimused on: etteantud liikumise teisendustüüp, sisend- ja väljundlinkide telgede asukoht. Sisendliikumine mehhanismis muundatakse väljundiks, näiteks pöörlemisest pöörlevaks, pöörlemisest translatsiooniks jne. Kui teljed on paralleelsed, valitakse lamemehhanismi skeem. Lõikuvate või ristuvate telgede puhul tuleb kasutada ruumilist skeemi. Kinemaatilistes mehhanismides on koormused väikesed, seega saab kasutada terava otsaga tõukureid. Jõumehhanismides viiakse vastupidavuse suurendamiseks ja kulumise vähendamiseks mehhanismi ahelasse rull või suurendatakse ülemise paari kontaktpindade kõverusraadiust.
Sünteesi teine etapp on meetriline. Selles etapis määratakse kindlaks mehhanismi lülide peamised mõõtmed, mis annavad etteantud seaduse mehhanismis liikumise või antud ülekandefunktsiooni teisendamiseks. Nagu eespool märgitud, on ülekandefunktsioon mehhanismi puhtalt geomeetriline omadus ja seetõttu on meetrilise sünteesi probleem puhtalt geomeetriline probleem, mis ei sõltu ajast ega kiirusest. Peamised kriteeriumid, millest projekteerija lähtub meetrilise sünteesi ülesannete lahendamisel, on: mõõtmete ja sellest tulenevalt massi minimeerimine; rõhunurga minimeerimine teie paaris; nukkprofiili valmistatava vormi saamine.
Meetrilise sünteesi probleemi püstitus
Antud:
mehhanismi plokkskeem; väljundlingi liikumise seadus S
B =
f(j1)
või selle parameetrid - h
B, jwork = jу + jeng + jс, lubatud survenurk -
|J|
Lisainfo: rulli raadius r p, nukkvõlli läbimõõt d sisse, ekstsentrilisus e(mehhanismi jaoks, mille tõukur liigub edasi) ,
keskpunkti kaugus a w ja nookurvarre pikkus l BC (väljundlüli edasi-tagasi pöörleva liikumisega mehhanismi jaoks).
Defineeri:
nuki starteri raadius r
0
; rulli raadius r
0
; nuki keskpunkti ja konstruktsiooniprofiili koordinaadid ri = f(di)
ja kui pole määratud, siis ekstsentrilisus e ja keskpunkti kaugus a
w.
Algoritm nukkmehhanismi projekteerimiseks vastavalt lubatud rõhunurgale
Keskmise valik on võimalik varjutatud aladel. Lisaks peate valima nii, et oleks tagatud mehhanismi minimaalsed mõõtmed. Minimaalne raadius r 1 * saame, kui ühendame saadud ala tipu, punkti Umbes 1* , päritoluga. Selle raadiuse valikuga profiili mis tahes punktis eemaldamisfaasis on survenurk lubatud nurgast väiksem või sellega võrdne. Kuid nukk peab olema valmistatud ekstsentrilisusega e* . Null-ekstsentrilisuse korral määrab algseibi raadiuse punkt Umbes e0 . Raadiuse väärtus on sel juhul võrdne r e 0 , mis on miinimumist palju suurem. Kui väljundlüliks on klahv, määratakse minimaalne raadius samamoodi. Kaamera starteri raadius r 1aw etteantud keskpunkti kaugusel ah , määratakse punktiga Oh 1aw , raadiusega aw kaare ristumiskoht piirkonna vastava piiriga. Tavaliselt pöörleb nukk ainult ühes suunas, kuid remonditöödel on soovitav, et nukk oleks võimalik pöörata vastupidises suunas, st võimaldada nukkvõllil tagurdada. Liikumissuuna muutmisel on eemaldamise ja lähenemise faasid vastupidised. Seetõttu tuleb tagurpidi liikuva nuki raadiuse valimiseks arvestada kahe võimaliku eemaldamise faasiga, st koostada kaks diagrammi S B= f(j1) iga võimaliku liikumissuuna jaoks. Pööratava nukkmehhanismi raadiuse ja sellega seotud mõõtmete valikut illustreerivad joonisel fig. 17.6.
Sellel pildil:
r1- Cami algseibi minimaalne raadius;
r 1е- algseibi raadius etteantud ekstsentrilisuse juures;
r 1aw- algseibi raadius etteantud keskpunkti kaugusel;
ah 0- keskpunkti kaugus minimaalse raadiusega.
Rulli raadiuse valik